
Location | |
San Francisco, CA |
Date | |
07/12 |
Team | |
Scott Page, Autodesk |
A team of engineers and architects got together to perform a full energy audit on an existing building in San Francisco, 1204 Mason.
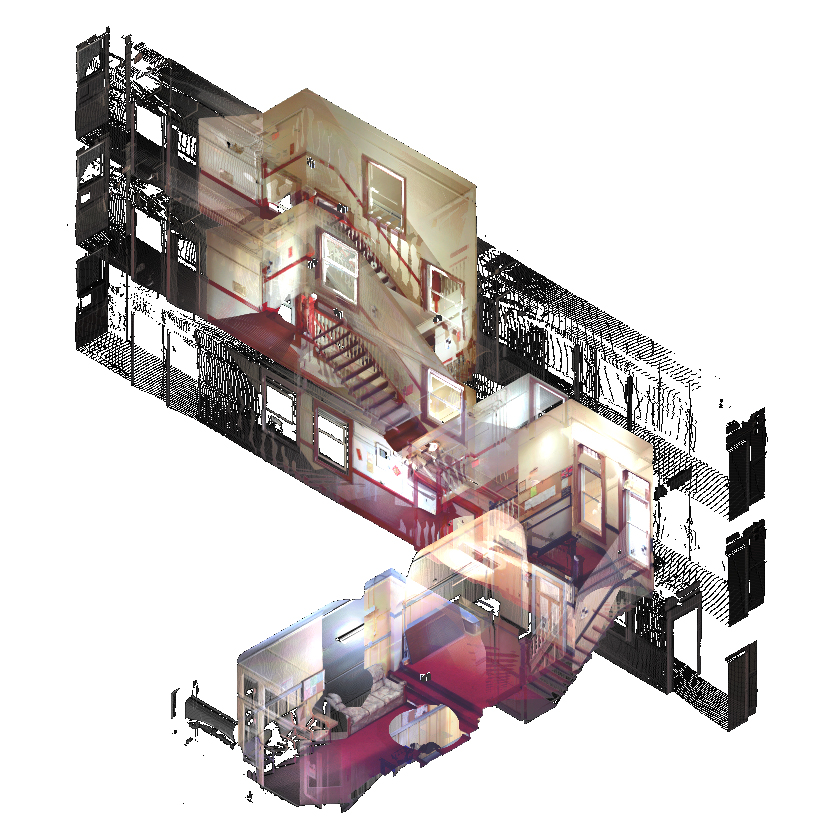
I worked with Scott Page to shoot a full laserscan of the exterior and certain interior rooms and used it to build a Revit Model in 2 days. (Very late nights.) Engineers from Glumac and Autodesk then worked to build out the full energy model. We presented the findings to the owner, Pacific Gas and Electric Company and Autodesk.
Project Team: Lauren Kuntz, PE; Aryn Bergman, PE; Adam Menter, Sarah Bonser, Scott Page, Andrea Martinez, PhD candidate; Sukreet Singh, MBS; Sean Hay Kim; Chien Si Harriman; Brian Skripac; Charles Morales; Mitch Dec; Bill DeWitt, CxA; Oliver Riley, PE

Role
I was fortunate enough to have the opportunity to use Scott Page's Faro laser scanner to get around 30 scans to construct an accurate point cloud of an existing building.
And Scott Page was such a hero during this whole process- He invited me to a laser scanning summit with me and shared best practices while we scanned.
Part of what makes this process so interesting is that yes, it's quick- but it just requires a bit of planning going in. We mapped out our course and set to it - finished measuring the whole building within about 10 hours. 4 floors starting from practically 0 documents. To have measurements that I'm 100% confident in is a pretty good trade off. I was really happy with the workflow of this project. We were incredibly efficient and ran into very few hiccups.
Stitching the scans together took very few additional post processing tricks- the targets very accurately snapped the scans into the correct locations.



Findings
Our suggestions to the owner mostly revolved around finding more efficient ways to operate the machinery within the retail portion and improve the envelope of the building via insulation and double pane windows. Our data was able to help the owner chose which course of action best fit their budget, priorities, and develop a schedule.


Best Practices for Laser Scanning.
Background: A laser scanner works by assigning Cartesian points along the visible surfaces within a room (can also be used outside as well). Since it cannot see through objects, multiple scans are required in order to develop a more informative and more accurate picture of the area. These are associated via markers set up in the field to provide reference points between locations. The deliverables allow for a measurable, viewable picture of the room in 3d or panoramic views.
1. Scope of Work: In order to expedite the process, it helps to assume certain things and get detailed information about others. In documentation of an existing structure, if there are certain givens, make sure the person operating the laser scanner knows this. While starting from scratch on documenting a project is an option, it will take significantly longer. If there are dimensions that a spot laser measuring device can provide, it is always nice to have. Also, depending on who is receiving the information affects what information needs to be focused on. The dimensions of a boiler room (Architectural) can be taken with one scan; however the models, sizes, and clearances in a boiler room (Mechanical) would require 4 or 5 scans. Another thing to acknowledge is the requirement for fragments of a building or a connected singular building rendered from the compilation of the scans.
2. Planning: As mentioned previously, the scanner may not need to document each area to the same extent on a project. Certain areas may be used just as a means to roughly connect integral pieces (such as hallways which stack). The scanner functions off of reference points which must overlap between scans- meaning it must have 3 defined points in common with any additional scan which needs to be attached. Which means the physical journey through the building is very important if all of the scans need to be contiguous. While traditional methods can be used to connect disparate parts, the point cloud as a whole dramatically loses accuracy. In order for a scan to work out, the laser scanner needs to physically move into each of the spaces. People have gotten creative with this requirement but it’s something that should most likely be mitigated in planning stages rather than improvised in the field.
3. Accessibility: Keep in mind paths of travel by existing demographics. If there are a lot of cars or pedestrian traffic in an area, those things will show up minimally in the scans. The main concern is movement of targets (reference points) which are required to stay in the exact same place between scans. It’s important to understand heavy traffic moments of the day; these obstacles can be mitigated by scanning in off hours or by shutting off certain areas for a period of time. The scanner weighs about 15 lbs. and is easy to carry and the battery has about 8 hrs. of dedicated on it per charge. Having said this, laser scanner itself is typically not the cause of problems during a scanning session. The Faro Scanner comes with 2 batteries and a 25 GB SD card caries a good amount of scans. (I’ve done days with 40 interior scans and haven’t run out of space)
4. Field Work: Getting good scans is more important than getting fast scans. Fixing errors takes about 4 times longer in the processing phase than in the scanning phase. Meaning – taking an additional scan to connect something will take about 15 minutes from start to finish. It may take upwards of an hour to reconnect the points manually through the program if the problem really did require an additional scan.
5. Double Checking: Making sure that targets were recorded as well as a thorough route was achieved where needed is critical. The whole benefit of this tool is the fact that you shouldn’t need to go back to the site for information which has been left out. Making sure each of the scans captured exactly what it was intending to is very important.
6. Environment: In order to have scans snap together in the processing phase, it is important for targets to remain in the same position. If one is moved, nudged, or removed it is rendered useless for the following scans. Lighting can also affect the output of the scans. Excessive sunlight will cause a dark spot in the scan. Trees will also provide potential problems. Obstacles will happen within the site, the key is to get enough information to fill in the gaps, while avoiding inundating the file with too many scans. Slopes do not affect scans as much as one would think- it has an inclinometer in it and automatically corrects up to 5 degrees when put on near-level ground. The tripod also allows for adjustability to slopes.
7. Stitching: All of the precautions about targets and reference points lead to this—the program which processes the raw point cloud data uses the recognizable points (targets) as a way of “stitching” together the scans. The better the reference points are, the easier of a time the program will have putting together the pieces. If it struggles with a certain one, it will yield a higher “tension” value and let you know. Walls can be defined by users which help the program understand correspondence between what it thought were separate objects. It can also use corners (as defined by users) to locate a scan in respect to others. However, these are risky because, as previously mentioned, it lowers the level of accuracy.
8. File structure: Files go through multiple types throughout the process. They start as a raw scan (scn) which is only readable by the scanner’s software (which is specific to brand of scanner). It uses inherent algorithms to decipher locations of scans relative to each other. The work in progress structure is a “linked” format (fws) which connects all of the working scans together in a document. This file structure holds connections between scans and objects in the scans. The first export is to a universal ASCII or point cloud format (xyz) this file is typically very large, but the most important file in respect to usability. Revit then condenses this file into a point cloud which it can recognize (pcg) where it is usable in certain programs and cannot be edited. The scans and the xyz document are good to archive as they serve as “originals” for the pieces and whole stages respectively. The pcg file is what Revit uses and is full point cloud in a single document.
9. Deliverables: It’s still up in the air what the best way to send files around to contractors or other firms would be. Faro’s scanner comes with a light weight version of the software which is only a viewer for the point cloud which helps mitigate the issue of having an otherwise inaccessible file type as a deliverable. Also, if the contractor has Revit, the pcg can be sent in addition to the rvt file to allow visibility. The xyz is large and hard to view and should typically be kept as an archive along with the original scans. As far as a visually appealing output, it can be colored using images mapped to their respective points. It can also be animated through using particle rendering in programs like 3ds max or Maya.
10. Usage: The field of laser scanning is constantly growing. It started as a means of documentation in the world of holography and developed into a super precise measuring tool. Contractors can use the point cloud as an interactive snapshot of a space. They can also be used for field reports of buildings under construction. BIM applications go hand in hand with implementation of laser scanning. It allows the accuracy of currently existing buildings modeled from plans and elevations to be dramatically increased. Also, hard to document spaces can be reproduced fairly accurately. With clever usage, it can be used to find the width of a wall (scanning on either side of a wall and connecting the scans via a hallway). In the construction process, it can be used to document changes made which are not shown in the construction documents—allowing for more accurate as-builts.
Case Study
PDF For more information on the efforts of the group
Faro Scanner
http://www.faro.com/default_usa_nojs.aspx?ct=us
Leica Scanner
http://hds.leica-geosystems.com/en/index.htm
Training and implementation:
Featured in Danelle Briscoe's book Beyond BIM